
LITHOS-1
Lunar Payload
Our mechanized lithotroph (“stone-eater“) processes lunar regolith into stable, load-bearing, reduced-dust surfaces in a single pass.
LITHOS-1 is a near-term technology demonstration payload designed to improve the usability of the lunar surface by converting loose regolith into stable, low-dust, load-bearing surfaces. A key challenge for sustained lunar operations is that unconsolidated regolith limits mobility, increases wear on equipment, and creates dust that degrades systems—and poses hazards to astronauts.
At the core of LITHOS-1 is a patent-pending system which works by excavating, compacting, and processing regolith in a single pass— without chemical or thermal inputs.
The system ingests regolith and removes the problematic, electrostatically charged ‘fines’—leaving only a gravel-like surface layer made of larger, interlocking particles over a compacted sub-grade.
This layered approach borrows from terrestrial ‘macadam’ paving techniques, adapted for the lunar surface using a single, low-SWaP (size-weight-power) unit.
DVAC TESTING (Feb 2026)
The first full-system test campaign was conducted in a dusty vacuum (DVAC) environment at the Planetary Surface Technology Development Lab at Michigan Technological University.
This critical test demonstrated successful excavation and compaction of regolith simulant under reduced-pressure conditions, validating core functionality. The test highlighted electrostatic effects as a primary system-level driver, with ongoing work targeting explicit characterization and mitigation.
Planned CLPS Integration
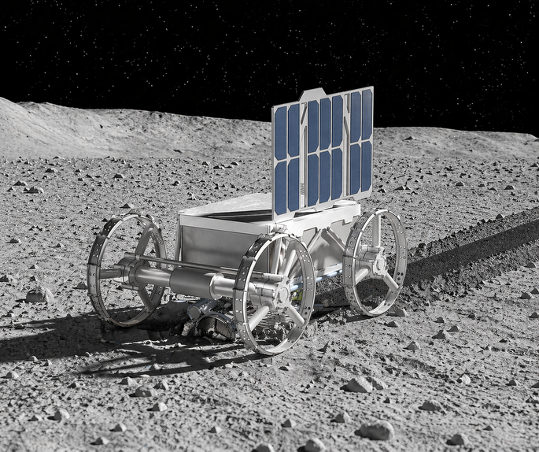
At approximately 5 kg and 20 W nominal power, LITHOS-1 is firmly aligned with near-term mass and power constraints, enabling practical deployment on smaller commercial landers and rovers, such as Astrobotic’s CubeRover 6U rover platform.
LITHOS-1’s key differentiator is the integration of multiple lunar site preparation stages into a single mechanized system with a compact, flight-relevant form factor.
This pragmatic, mission-oriented approach enables a scalable and deployable surface preparation capability supporting sustained robotic and industrial lunar operations within Artemis timelines.
